I'm a Research Scientist at Meta Fundamental AI Research (FAIR). I work on multimodal embodied AI agents, including 3D scene understanding and robotics.
Before that, I received a Ph.D. in Computer Science and Engineering at the University of Michigan, working with David Fouhey and Joyce Chai. Before that, I obtained my B.S.E. from both the University of Michigan and Shanghai Jiao Tong University, working with Jia Deng.
Google Scholar. CV. Github. Twitter. Linkedin.
Office: 1101 Dexter Ave N, Seattle, WA 98109
News
- [2026/01] We'll organize the 2nd edition of the 3D-LLM/VLA Workshop at CVPR 2026!
- [2025/10] We're looking for research interns starting next year working on multimodal computer use agents. If you are interested, please drop me an email and apply here.
Work Experience


Publications
ICML 2026.
[project page] [paper]
ICML 2026.
[project page] [paper] [code]
CVPR 2026.
[project page] [paper] [code]
CVPR 2026 Findings.
[paper]
arXiv 2026.
[project page] [paper] [code]
arXiv 2025.
[project page] [paper] [code]
EMNLP 2025 (Findings).
[paper]
CVPR 2025.
[project page] [paper]
CVPR 2025.
[project page] [paper] [demo]
NeurIPS 2024.
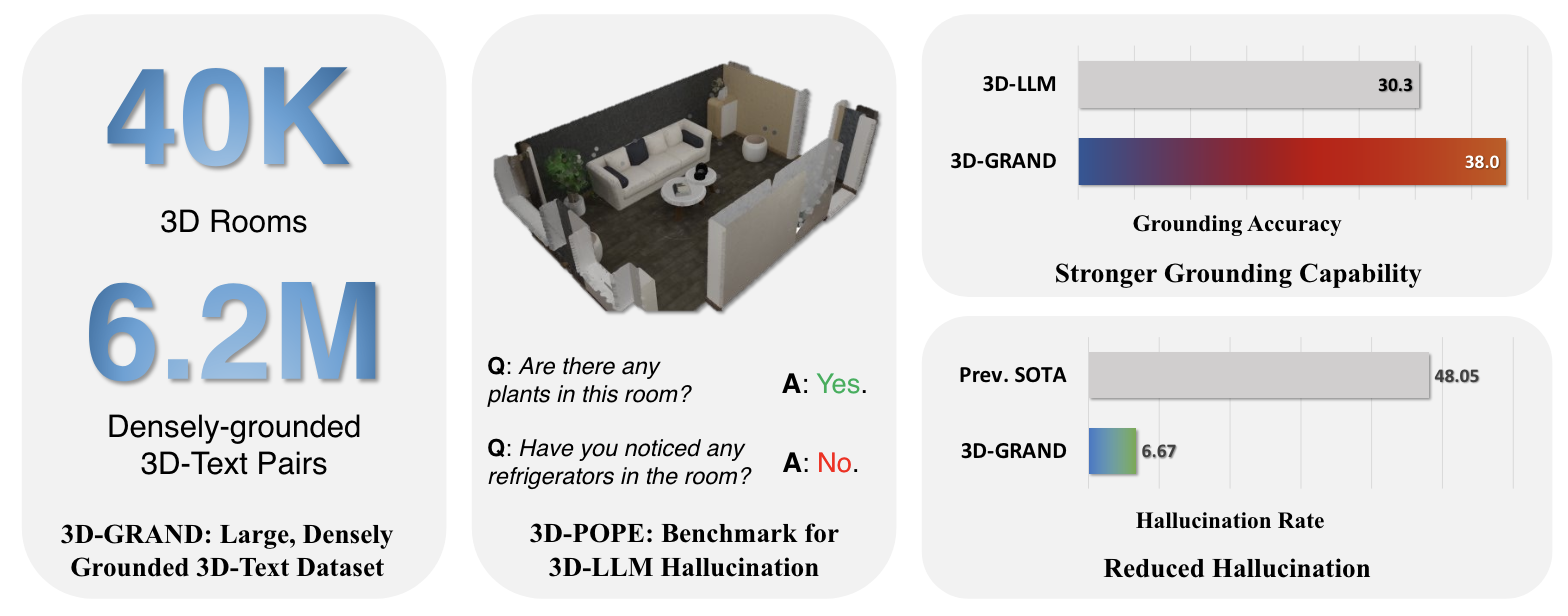
[project page] [paper] [code] [dataset]
CIKM 2025.
[paper]
The paper is also presented at NeurIPS 2024 Workshop on Adaptive Foundation Models.
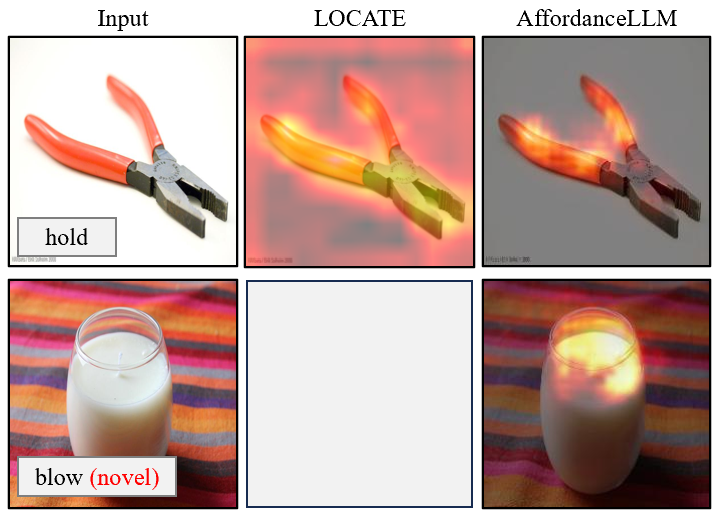
We aim to enhance the generalization capability of affordance grounding to in-the-wild objects that are unseen during training, by developing a new approach AffordanceLLM, that takes the advantage of the rich knowledge from large-scale VLMs.
[project page] [paper]
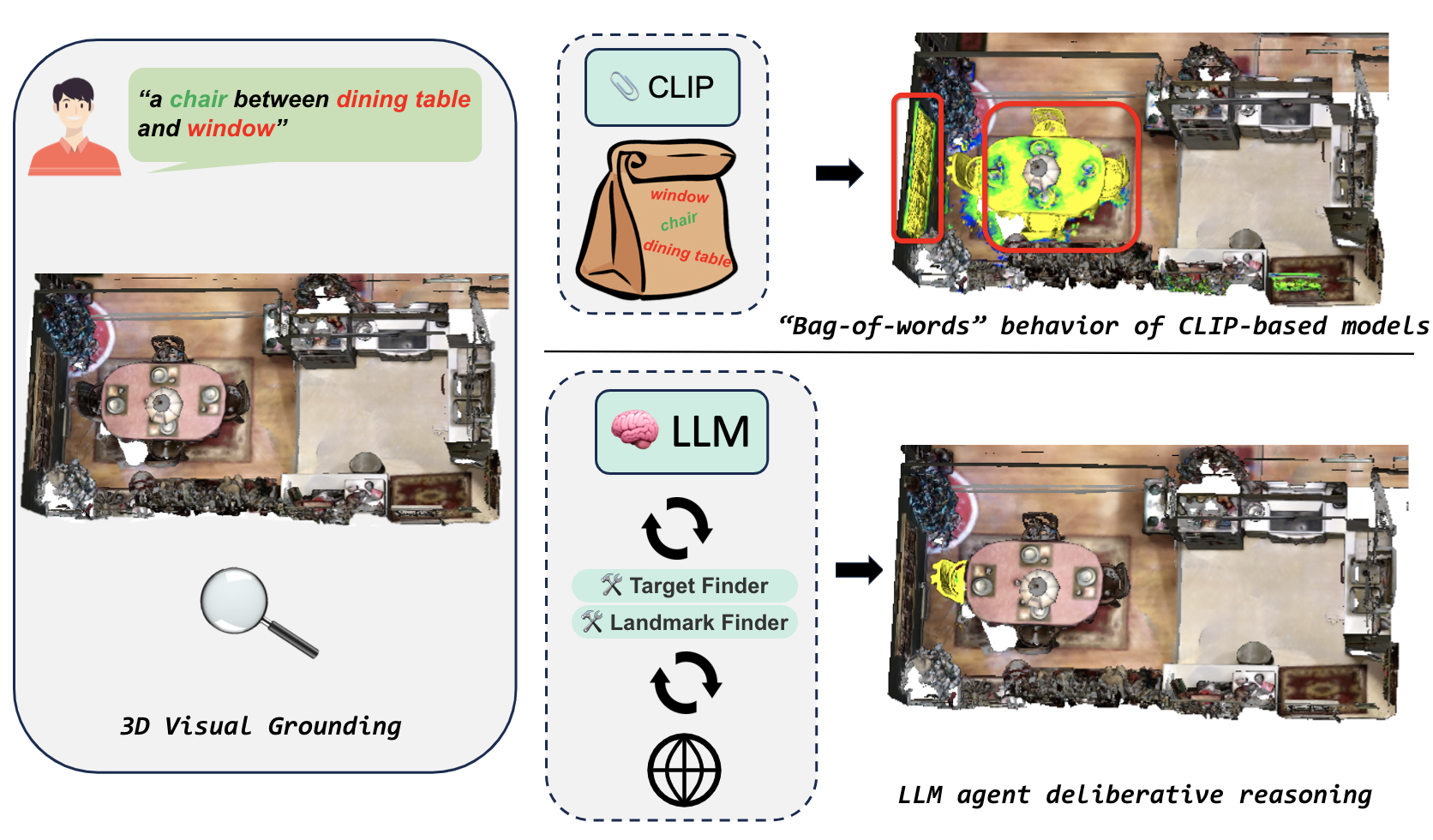
Adding an LLM agent can be a simple and effective way to improve 3D grounding capabilities for zero-shot open-vocabulary methods, especially when the query is complex.
[project page] [paper] [demo] [code] [video]
The paper is also presented at CoRL 2023 Workshop on Language and Robot Learning.
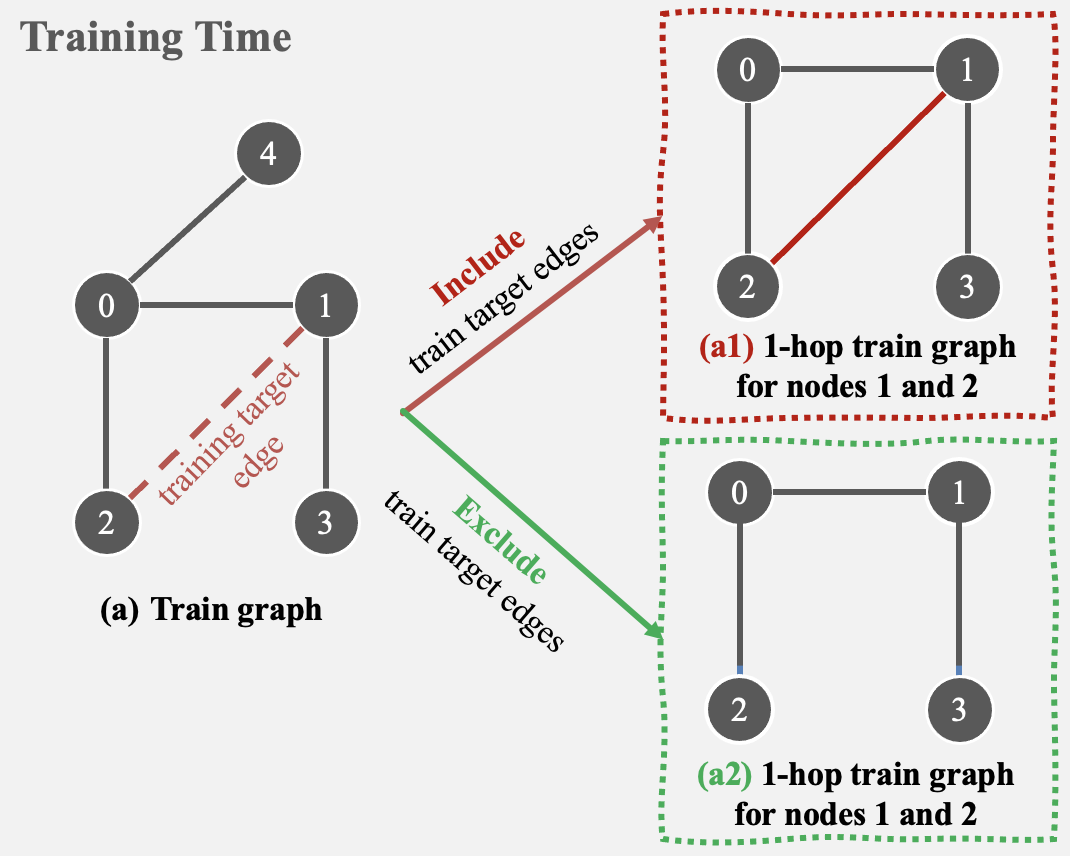
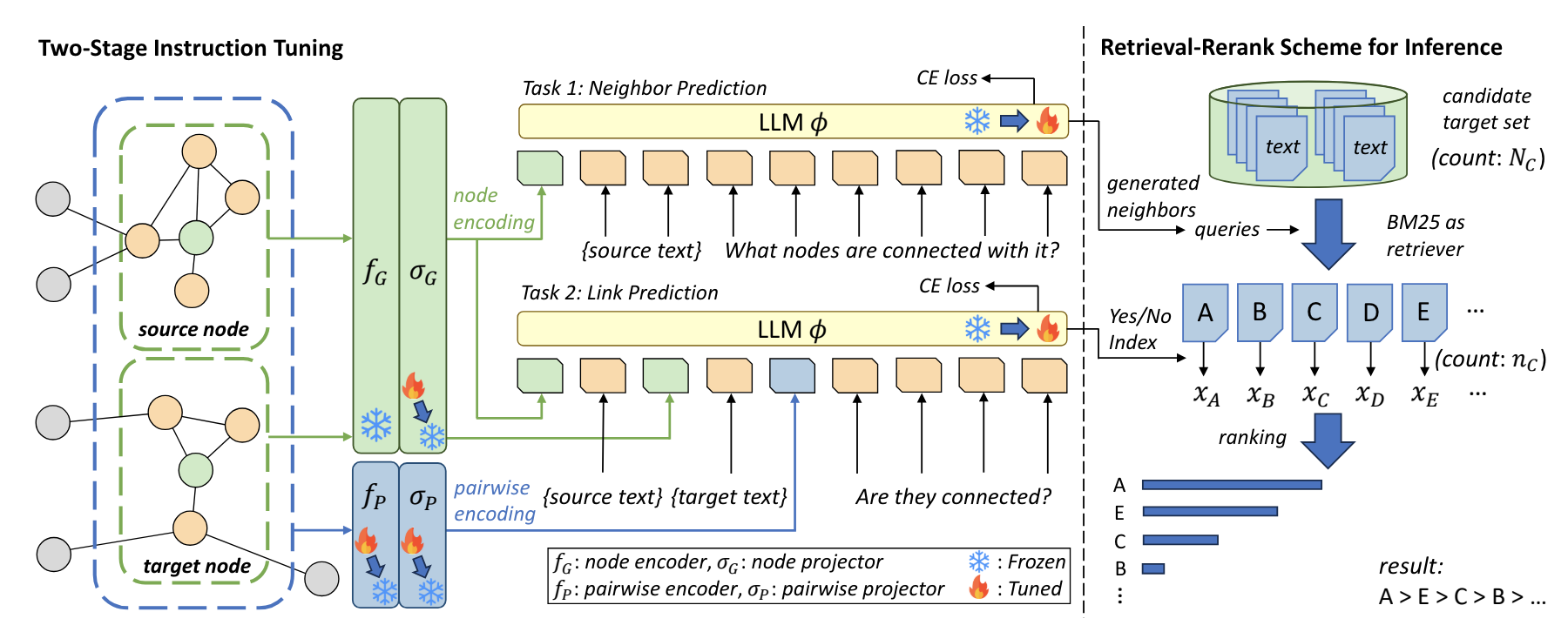
We address several common pitfalls in training graph neural networks for link prediction.
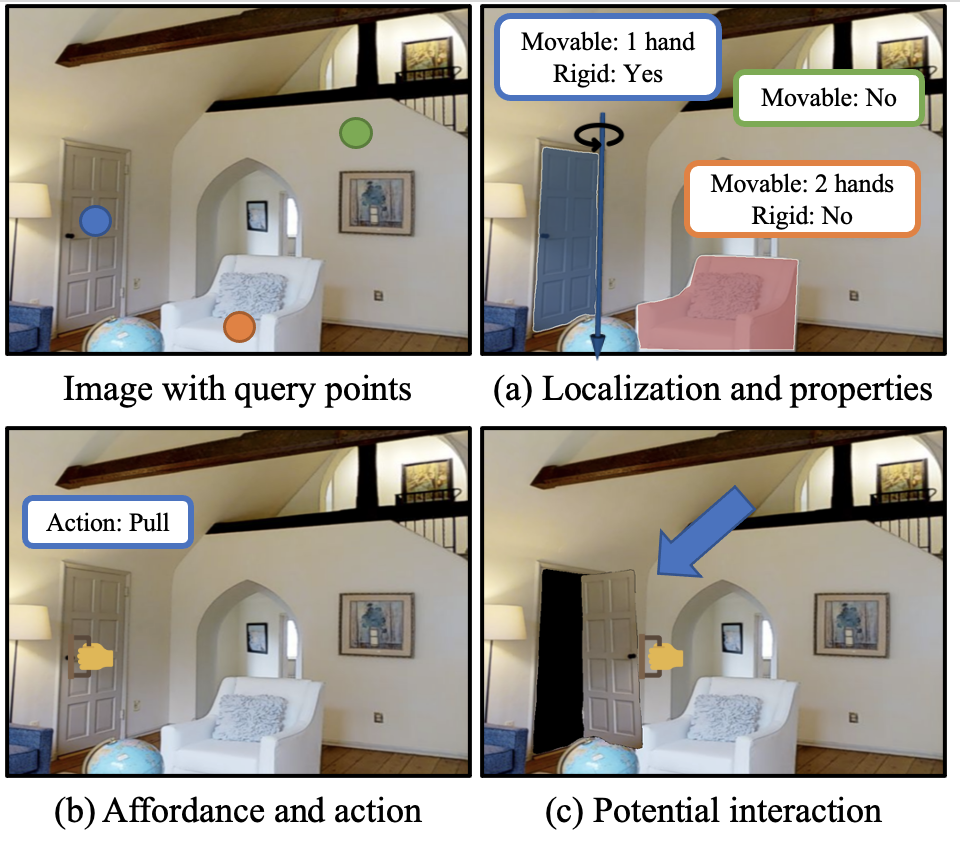
We detect potential 3D object interaction from a single image and a set of query points. Building on Segment-Anything, our model can predict whether the object is movable, rigid, and 3D locations, affordance, articulation, etc.
[OpenXLab demo (with gpu)] [HF demo (cpu)]
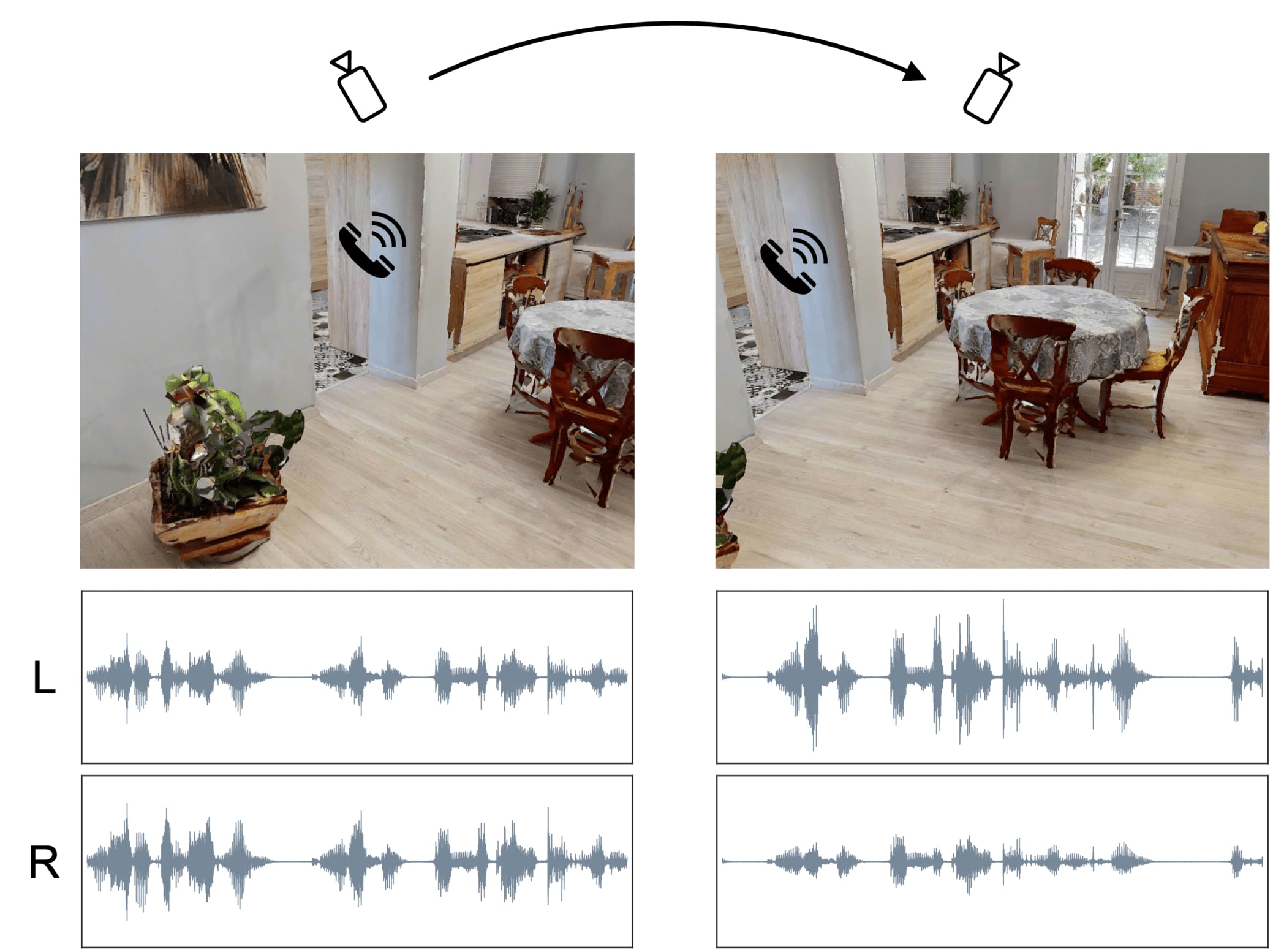
We jointly learn to localize sound sources from audio and to estimate camera rotations from images. Our method is entirely self-supervised.
[project page] [paper] [code] [bibtex]
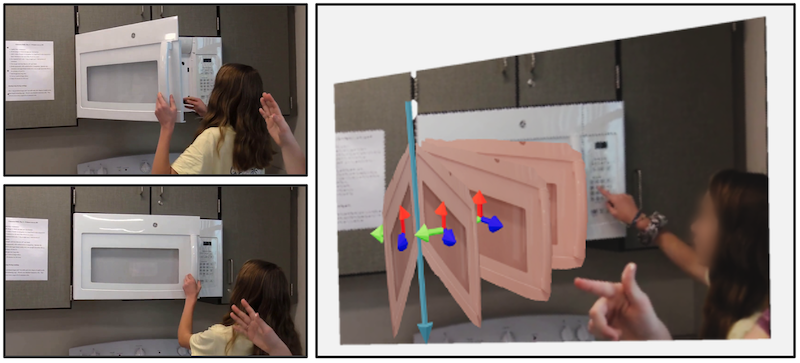
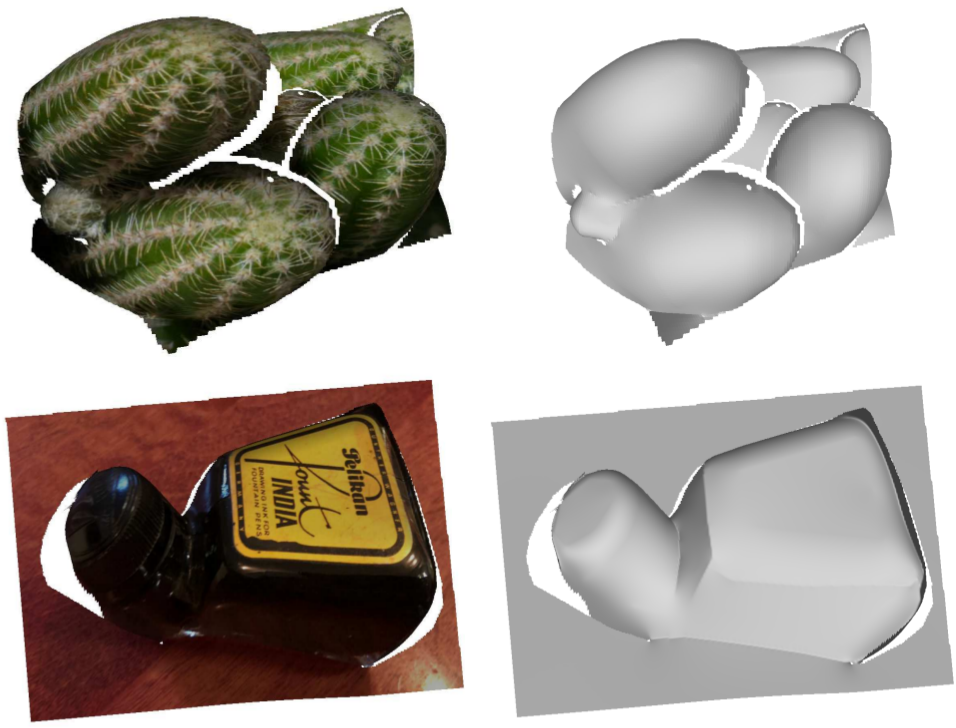
We propose to investigate detecting and characterizing the 3D planar articulation of objects from ordinary videos.
[project page] [paper] [code] [bibtex] [CVPR talk]
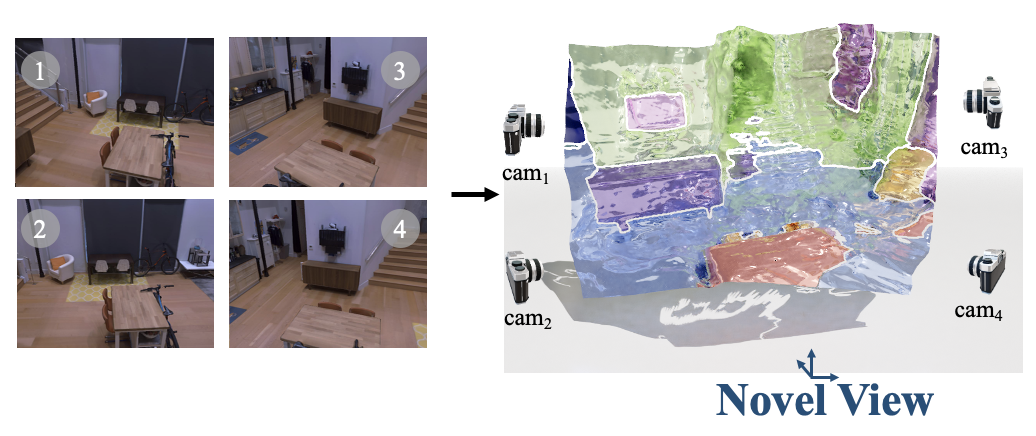
We propose ViewSeg, which takes as input a few RGB images of a new scene and recognizes the scene from novel viewpoints by segmenting it into semantic categories.
[project page] [paper] [code]
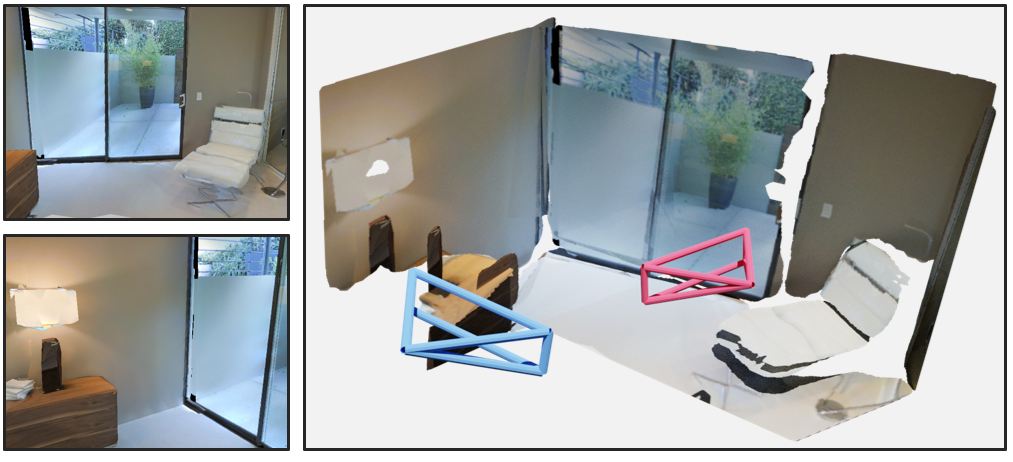
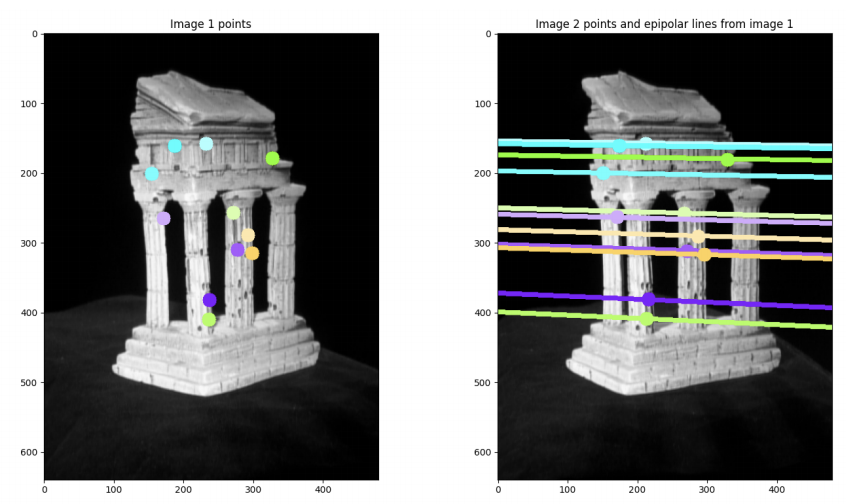
We create a planar reconstruction of a scene from two very distant camera viewpoints.
[project page] [paper] [code] [bibtex] [ICCV talk] [ICCV poster]
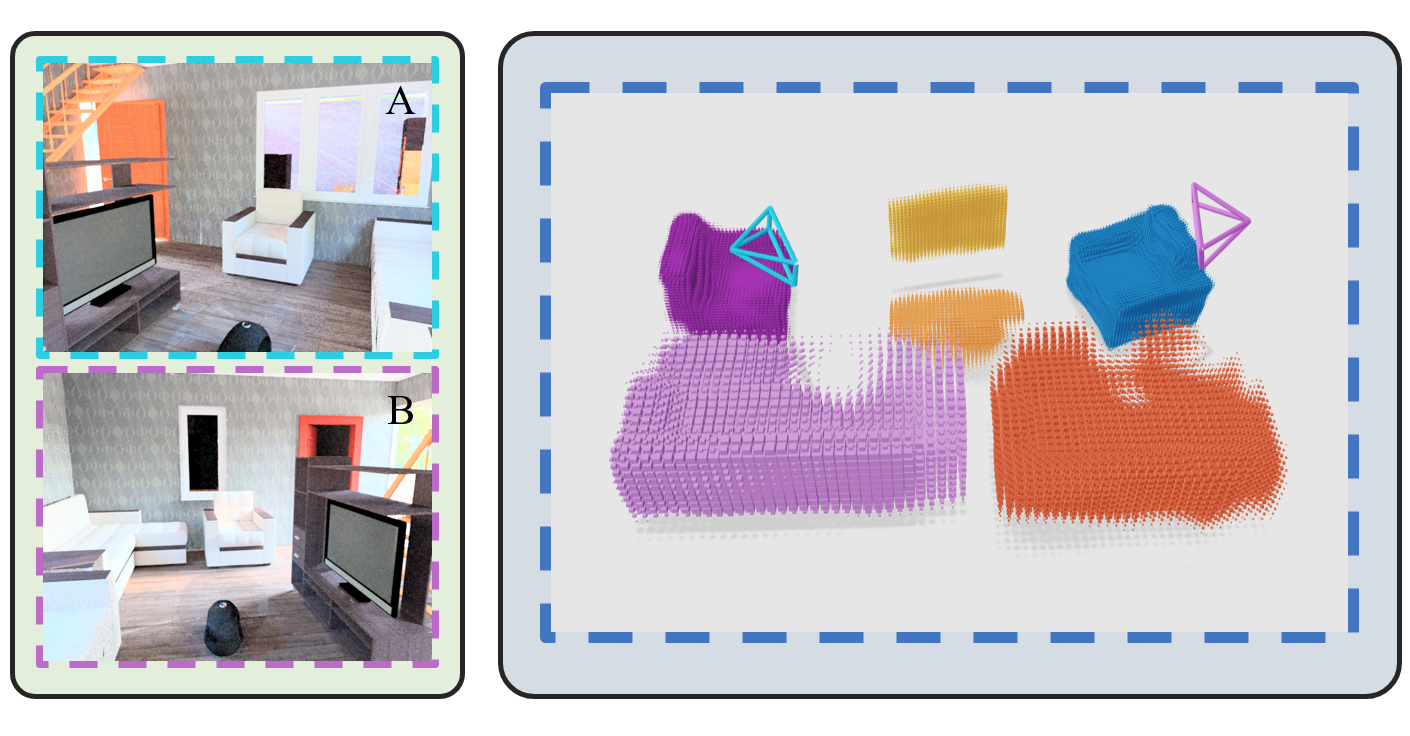
We present Associative3D, which addresses 3D volumetric reconstruction from two views of a scene with an unknown camera, by simultaneously reconstructing objects and figuring out their relationship.
We present Open Annotations of Single Image Surfaces (OASIS), a dataset for single-image 3D in the wild consisting of dense annotations of detailed 3D geometry for Internet images.

We propose a method to automatically generate training data for single-view depth through Structure-from-Motion (SfM) on Internet videos.
Teaching
IA with David Fouhey.
TA with Weikang Qian and Paul Weng.